


Buon pomeriggio, oggi voglio condividere le istruzioni su come fare un carro armato giocattolo controllato dall'accelerometro di un telefono Android. La base del serbatoio sarà realizzata in compensato colorato spesso 3 mm. Bruchi e motore a doppia marcia della nota azienda Tamiya. Produzione di parti economiche e di qualità.
Per il serbatoio abbiamo bisogno di:
- Tamiya 70168 doppia marcia
- Set di rulli e cingoli Tamiya 70100
- Tamiya 70157
- Compensato 10 mm (un piccolo pezzo)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Modulo Bluetooth HC-06 o equivalente
- USB-UART per firmware Arduino
- LED rettangolari rossi e verdi
- LED bianchi 5 mm 2 pezzi.
- Resistori 3x 150 Ohm
- Batterie agli ioni di litio 18650
- Connettori Dupont Dad-Mom
- Fili di diversi colori
- saldatura
- Colofonia
- saldatore
- Bulloni 3x40, 3x20, dadi e rondelle per loro
- 2x10 viti per legno
- Punte per legno 3 mm e 6 mm
- Sega elettrica
- Vernice acrilica
Passaggio 1 Montaggio del motoriduttore.
Mi piace usare i motoriduttori Tamiya. Sono accettabili, si montano facilmente. Tamiya 70168 ha quattro opzioni di costruzione. A seconda del rapporto di trasmissione desiderato e della posizione degli alberi di uscita.
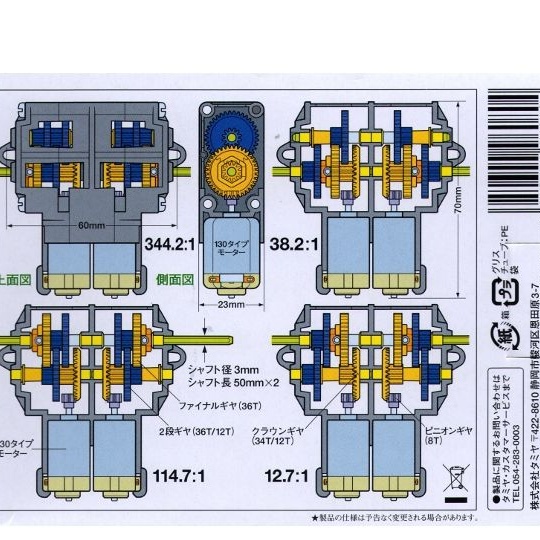
Le istruzioni dettagliate sono incluse all'interno del cambio. Abbiamo bisogno che gli alberi di uscita siano più vicini ai motori e il rapporto di trasmissione 114,7: 1. Selezioniamo l'opzione di cui abbiamo bisogno e raccogliamo tutto secondo le istruzioni, ad eccezione dell'installazione dei motori. È più conveniente posizionare i motori in un secondo momento, inoltre, i cavi e i condensatori devono essere saldati prima dell'installazione.
Step 2 Produzione di parti del corpo.
La custodia sarà realizzata in multistrato di spessore 3 mm. Scarica l'immagine seguente e stampala su un foglio A4 con una scala del 102%.
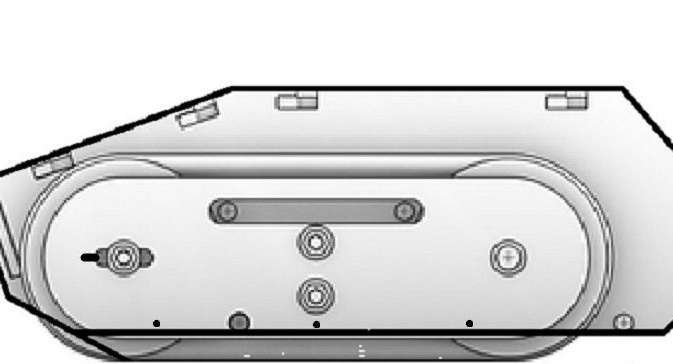
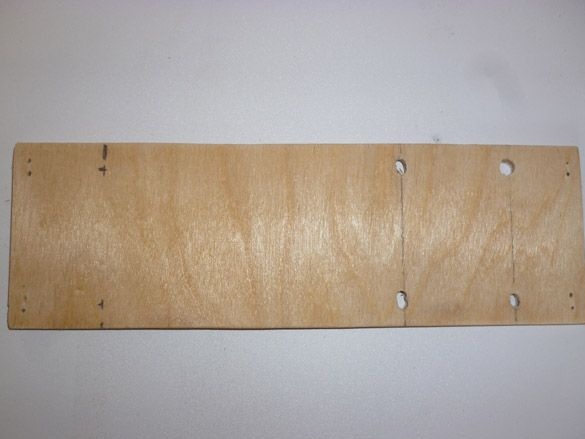
Ora prendiamo due pezzi di compensato di dimensioni sufficienti, ne mettiamo uno sull'altro, applichiamo la nostra foto in cima. I fori da 3 mm devono essere realizzati nelle aree contrassegnate da un punto in grassetto. Affinché entrambe le parti siano uguali, prima foriamo un foglio e due compensato in uno dei punti, inseriamo un bullone lì e torchiamo insieme l'immagine e due pezzi di compensato. Quindi il secondo foro e inserire anche un bullone lì. Dopodiché, analizziamo tutto il resto. Presta attenzione al foro più a sinistra, è necessario dargli una forma ovale. Ciò è necessario per controllare la tensione dei binari. Ora prendiamo un puzzle e ritagliamo immediatamente due parti laterali della custodia, seguendo la linea audace dell'immagine. Due di questi dettagli dovrebbero rivelarsi:
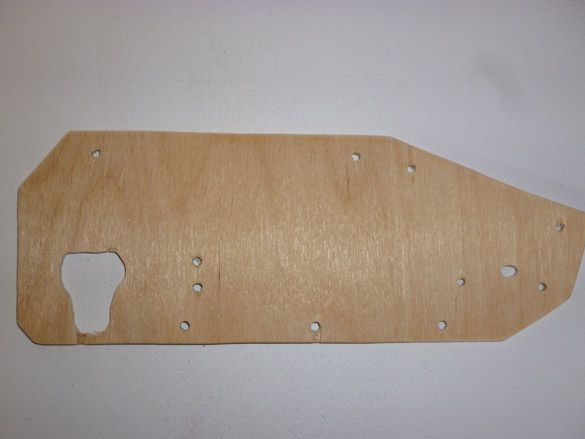
Successivamente, devi fare tutto quanto sopra, solo che questa volta abbiamo ritagliato due parti che coprono le tracce. È necessario tagliare il piccolo ovale disegnato nella foto. Di conseguenza, otteniamo altri due dettagli:
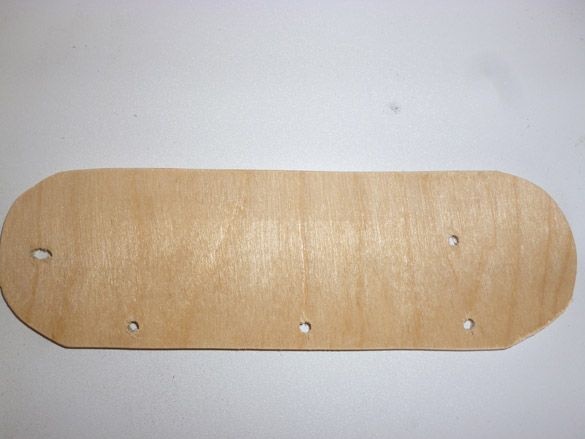
Ora prendiamo un foglio di compensato in uno strato e tagliamo un rettangolo con dimensioni di 168 x 54 mm. Questo sarà il fondo del nostro serbatoio e la parte a cui è collegato il motoriduttore:
Per iniziare l'assemblaggio, abbiamo bisogno di tutti i dettagli sopra descritti:

Puoi lasciare tutti i dettagli così come sono, ma preferisco dipingerli. La vernice acrilica è adatta per la pittura. Si asciuga rapidamente e non ha odore, il che significa che puoi dipingere in qualsiasi stanza senza paura di avvelenare. Quindi, dipingiamo i dettagli ritagliati:

Ora abbiamo bisogno di un compensato da 10 mm o di un bastoncino di legno adatto. È necessario tagliare un rettangolo di 54 x 15 mm e uno spessore di 10 mm. Questa parte è necessaria per collegare insieme l'alloggiamento. Dopo aver fatto un rettangolo, eseguiamo due fori a una distanza di 15 mm dal bordo, prima con un trapano da 3 mm e poi 6 mm, ma non completamente, ma solo metà della profondità. Inserire i dadi nei fori ottenuti e fissarli con la colla. Abbiamo bisogno di quattro di questi dettagli:

Ancora una volta prendiamo il compensato di 3 mm di spessore. Taglia un rettangolo 107 x 60 mm. Ritirandosi di 15 mm dai bordi del foro di 3 mm, questo sarà il coperchio superiore:

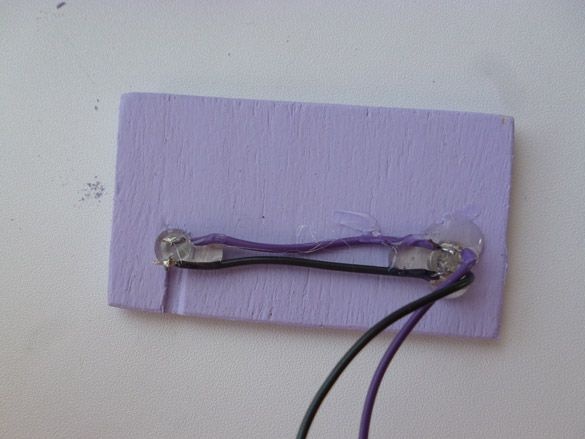
Tagliamo il rettangolo successivo che misura 33 x 60 mm. Sostenendo 15 mm dai bordi, eseguiamo due fori con un diametro di 5 mm. Tagliamo e spogliamo una parte e la dipingiamo. Quindi inseriamo LED bianchi da 5 millimetri nei fori realizzati. Li saldiamo in parallelo e li ripariamo usando l'adesivo hot melt:
Passaggio 3 Montaggio dell'alloggiamento.
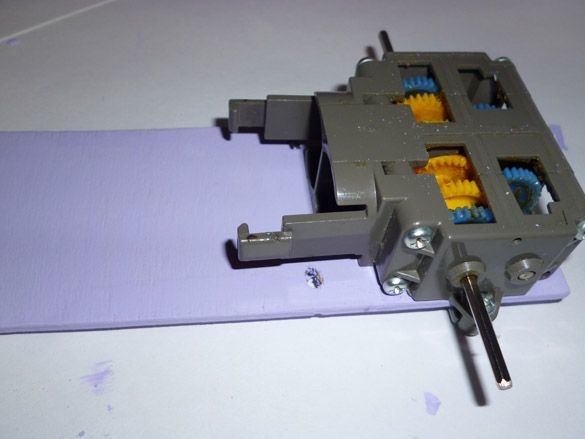
Dopo aver preparato il motoriduttore e le parti, procediamo al montaggio di tutto insieme. Per iniziare, prendi la parte inferiore del case e fissalo al motoriduttore:
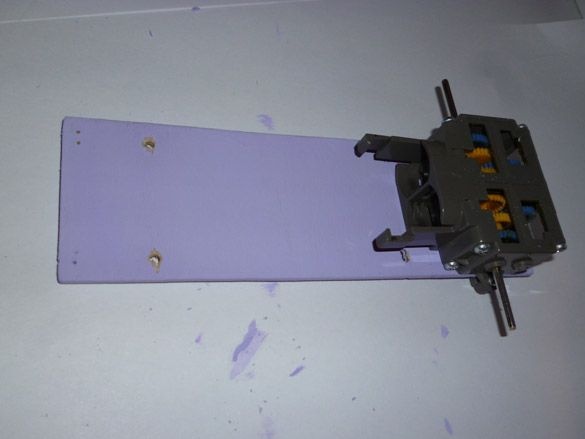
E un po 'più grande:
Quindi fissiamo le parti laterali, usando gli angoli di un costruttore di ferro per bambini e bulloni 3x20 mm per questo:

Ora dobbiamo installare le tracce. Prendiamo i dettagli delle tracce di chiusura. Inseriamo bulloni da 3x40 mm nei fori. Mettiamo una grande ruota sul bullone anteriore, in basso tre piccole, quindi le rondelle e stringiamo i dadi, ma non serrano, in modo che tutti i rulli ruotino liberamente. Mettiamo grandi ruote dentate sugli alberi del motoriduttore. Uniamo tutti i bulloni con i rulli con fori sulle parti laterali. Dopo aver passato i bulloni, avvolgiamo e stringiamo i dadi dall'interno della custodia. Mettiamo i binari, controlliamo se sono abbastanza stretti. I trattori a cingoli non dovrebbero abbassarsi, ma troppa tensione li danneggerà. La regolazione viene effettuata dalla ruota anteriore, spostandola o viceversa, allontanandola dal motoriduttore. Dopo tutte le manipolazioni otteniamo:

Prendiamo i motori forniti con i rulli e le piste. Saldiamo ai cuscinetti di contatto del filo e in parallelo con loro un condensatore da 0,1 microfarad. Successivamente, installare i motori nel motoriduttore:

Passiamo alle batterie. Abbiamo saldato le nostre batterie agli ioni di litio 18650 in parallelo e abbiamo emesso i fili per comodità. Torcili con nastro isolante:

Li posizioniamo nella parte inferiore del case, accanto ai motori:
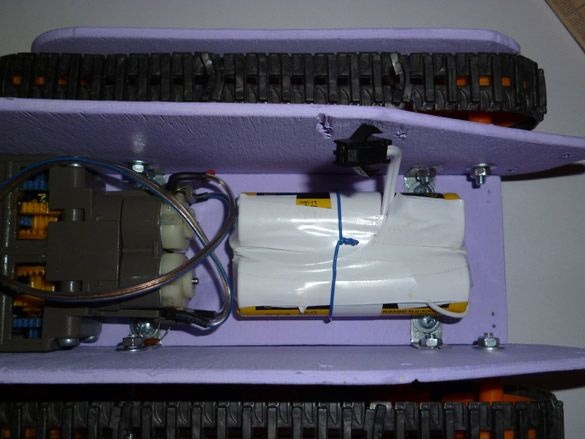
Per comodità, così come la separazione di meccanica e elettronico parti, ritaglia un rettangolo di 100 per 54 mm da plastica sottile o cartone. Posizionalo sopra il motoriduttore e le batterie:
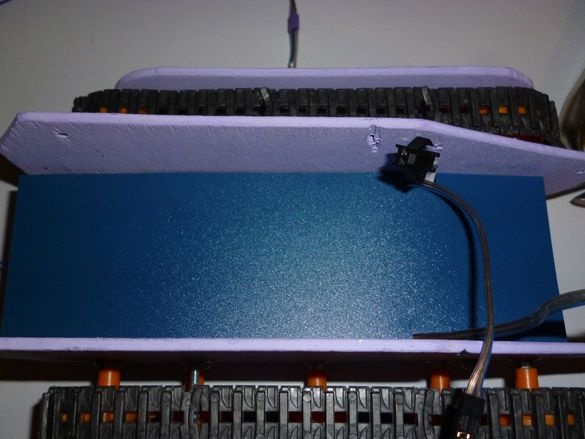
Prendiamo gli elementi di fissaggio e li installiamo come mostrato nella foto. Fissiamo alle parti laterali usando le viti:
Sul retro del serbatoio, attacciamo LED rettangolari alla colla a caldo. Rosso e verde:

Uso anche la colla a caldo per fissare la parte anteriore con i fari:

Passaggio 4 Impianto elettrico
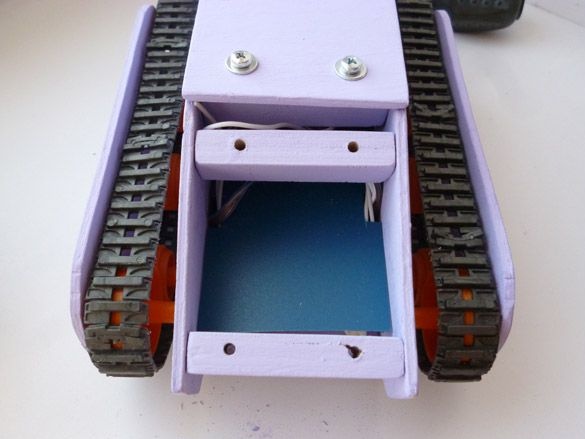
I motori elettrici interferiscono con il loro funzionamento e si verifica una caduta di tensione durante l'avvio. In modo che ad ogni avvio dei motori l'Arduino non sovraccarichi, divideremo l'alimentazione. Arduino è alimentato da una batteria da 9 volt del tipo a corona e da motori da batterie. Abbiamo già posizionato le batterie, posizioneremo la corona davanti al serbatoio:

Dopo aver installato la batteria, chiudila con il coperchio superiore:

Colleghiamo tutto insieme secondo lo schema:
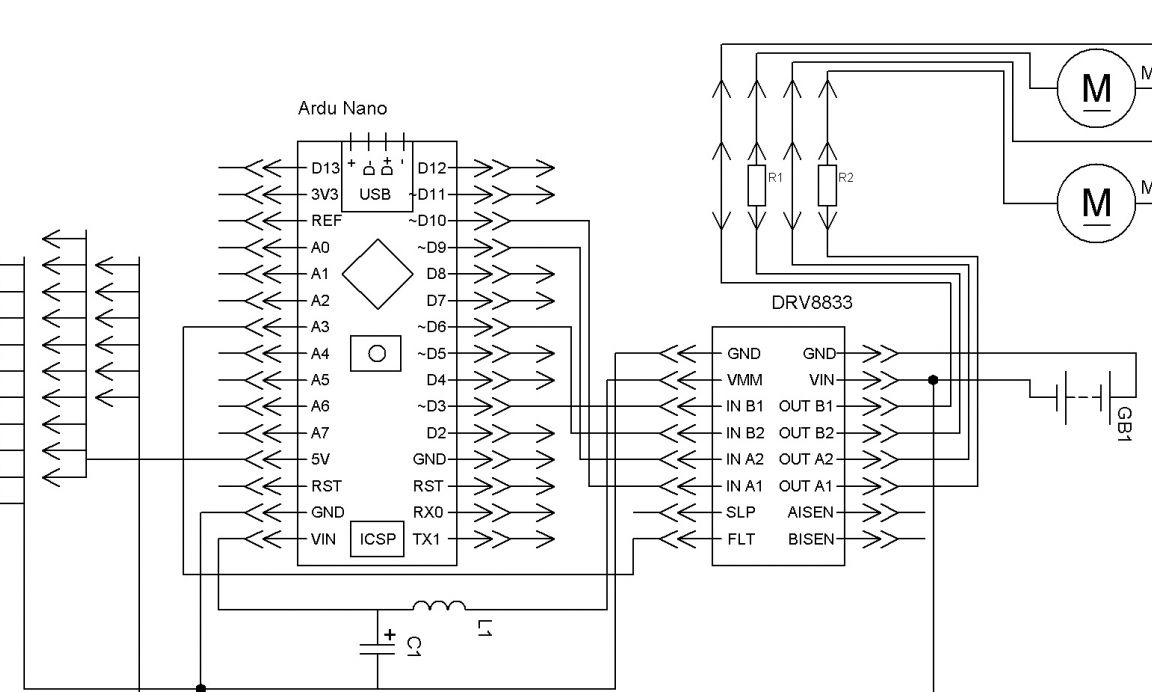
Spiegherò un po '. Il motore sinistro attraverso il driver è collegato ai pin 5 e 6. Destro - a 9 e 10. Più dal LED rosso attraverso la resistenza a 3 pin, meno a GND. Inoltre dal LED verde, anche attraverso la resistenza, a 4 pin. Fari a 2 pin.
Il funzionamento del modulo Bluetooth viene eseguito tramite la libreria SoftwareSerial.Useremo la porta software. I contatti di connessione possono essere modificati nello schizzo. Colleghiamo il modulo come segue:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Mettendo tutto insieme mettiamo un elettricista nella parte centrale:
Passaggio 5 Software.
Per lavorare con lo schizzo, è necessario scaricare l'IDE di Arduino. Andiamo avanti e scarichiamo l'ultima versione:
Quindi è necessario aggiungere la libreria. SoftwareSerial dovrebbe essere già nell'IDE di Arduino. Ma per ogni evenienza, lo posterò:
Se l'IDE di Arduino, durante la compilazione dello schizzo, genera un errore e giura sulla libreria mancante, decomprimere l'archivio scaricato nella cartella "librerie" situata nella cartella con l'IDE di Arduino installato.
Passaggio 6 Preparare il modulo Bluetooth.
Le impostazioni predefinite del modulo Bluetooth sono diverse da quelle di cui abbiamo bisogno. Pertanto, è necessario innanzitutto stabilire la connessione del modulo Bluetooth con il computer e modificare le impostazioni. Riempi lo sketch Send_ AT_Bluetooth in Arduino:
Arduino fungerà da collegamento tra Bluetooth e il computer. Avvia l'IDE Arduino, apri Port Monitor. Per HC-06, selezionare 9600 nelle impostazioni del monitor porta, NL e CR non sono necessari. Se non viene stabilita una connessione Bluetooth con il modulo, è in modalità di immissione comando AT. Forse la prima volta che il modulo non risponderà. Quindi provare a sovraccaricarlo scollegando e ricollegando il cavo positivo. Tutti i comandi vengono inseriti senza virgolette, non dimenticare di premere Invio per inviare. Inseriamo i seguenti comandi:
"AT" - senza virgolette, dovrebbe apparire la risposta "OK".
"AT + NAME
“AT + BAUD7” - imposta la velocità su 57600.
"AT + RESET" - sovraccarichiamo il modulo.
Se qualcosa è andato storto o non ricordi le impostazioni:
“AT + ORGL” - riporta il modulo alle impostazioni di fabbrica.
Passaggio 7 Riempi lo schizzo.
Dopo aver configurato il modulo Bluetooth, procedere con la compilazione del disegno principale:
Passaggio 8 Prepara il tuo telefono Android.
Prima dell'uso, assicurati che il tuo telefono o tablet Android abbia un accelerometro. Per iniziare, aggiungi un dispositivo Bluetooth in Android. Andiamo nelle impostazioni Bluetooth, troviamo il modulo Bluetooth che hai nominato e connettiti. La password per la connessione è “1234” o “0000”, può essere diversa per diversi modelli. Ora installa il programma di controllo. Avremo bisogno di un controller Arduino Bluetooth RC per auto o BT. Entrambi i programmi sono gratuiti, hanno la possibilità di controllare il dispositivo Bkuetooth tramite l'accelerometro e sono su Google Play. Scarica il programma che ti piace sul tuo telefono o tablet. Nel menu delle impostazioni del programma, immettere i seguenti comandi:
W - avanti
S - indietro
A - sinistra
D - giusto
F o G– stop
K - fari
L - faro spento
Puoi anche usare il joystick per controllare il serbatoio. Può essere fatto secondo il mio altro istruzione.
E aggiungi un modulo Bluetooth ad esso, seguendo un altro istruzione.

