

Anyagok és eszközök a robot gyártásához:
- bármilyen 1,5 l-es műanyag palack;
- egy régi gép a vezérlőpulton;
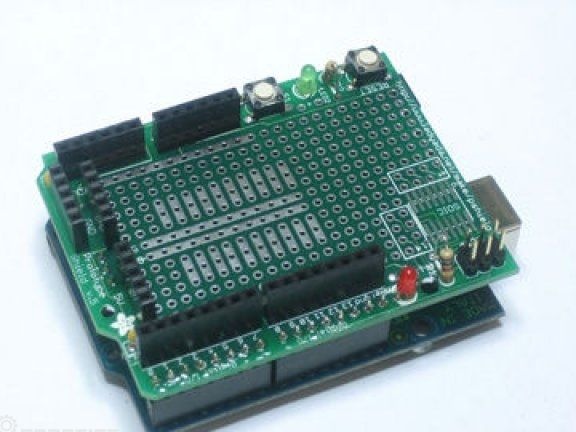
- Arduino Proto pajzs készlet;
- szoftvercsomag Arduino Uno;
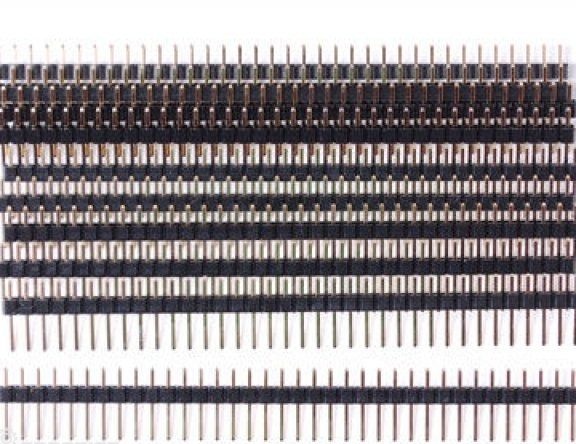
- összekötő érintkezők (készlet);
- Nő / női típusú jumperkészlet;
- 6 voltos napelem;
- Két Parallax szervosz (folyamatos forgás);
- két standard szervos, Parallax 4-6VDC típusú;
- ütközésérzékelő Parallax Ping Sensor;
- tartó négy AA elemhez;
- 9V-os akkumulátor tartója;
- négy fénymérő;
- négy LED-es tartó;
- négy ellenállás 10K ohmonként;
- egy 1N4001 mikro-1A dióda.


A szükséges szerszámok közül: forrasztópáka forrasztóval, fogó, dremel, oldalmaró és egy másik szerszám.
Robot összeszerelési folyamat:
Első lépés. Robot agy eszköz
Az Arduino Uno mikrovezérlő a legmegfelelőbb erre a robotra, mivel kis projektekhez készült, és a C ++ használatával programozták.
A robot négy szervóval rendelkezik, az egyik a kerekeket vezérli, feladata a kerekek folyamatos forgatása. A második szervóra van szükség a robot feje irányításához, ütközésérzékelők vannak rá felszerelve. És egy másik szervomotor vezérli a robot tengelyét, arra kényszerítve, hogy forogjon.
Fontos megérteni, hogy az Arduino Proto Shield tábla a palackban helyezkedik el, ezért olyan elektromos áramkört kell készítenie, amely kényelmes különféle érzékelők, szervók és más eszközök csatlakoztatására és leválasztására. Erre a célra a Proto Shield tábla minden szükséges Adafruit érintkezővel tökéletes. Az érintkezőket meg kell forrasztani a Proto Shield képernyőhöz, és minden elemet jumperekkel kell összekötni.
A tábla középső részén két csatorna található, amelyek +5 V-ra és GND-re vannak csatlakoztatva. Ezen csatornák jobb és bal oldalán merőleges panelek láthatók. Szükségük van arra, hogy öt kitörő érintkezőt összekapcsoljanak a merőleges panelek és a két csatorna között. Innentől kezdve a szervomotorok energiát, valamint vezérlő impulzusokat fognak kapni.
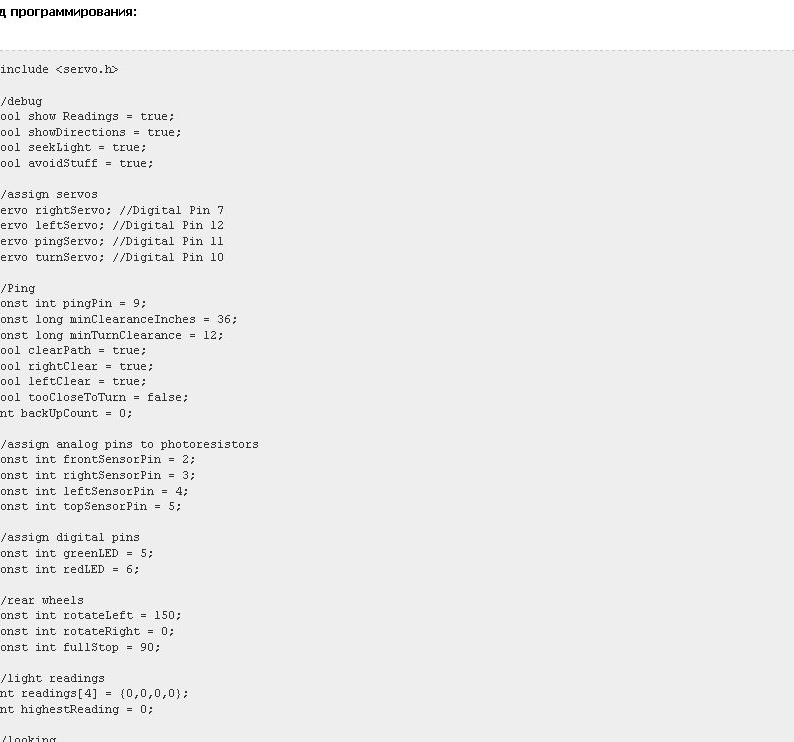
Ha megnézi az alábbi képet, láthatja, hogy a Proto pajzshoz tartozó csatlakozók nem vannak megforrasztva a digitális kimenetek második oldalához és az analóg érintkezőkhöz. Ezt meg kell hagyni, ahogyan a vezetékeket közvetlenül a panelhez forrasztják.
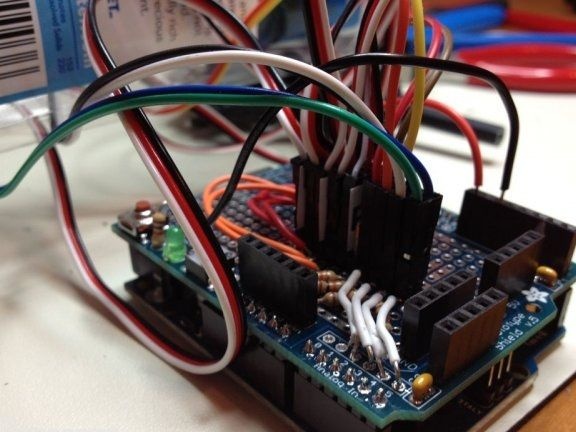
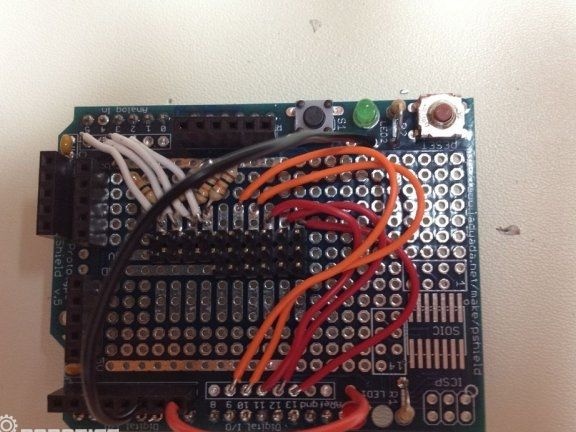
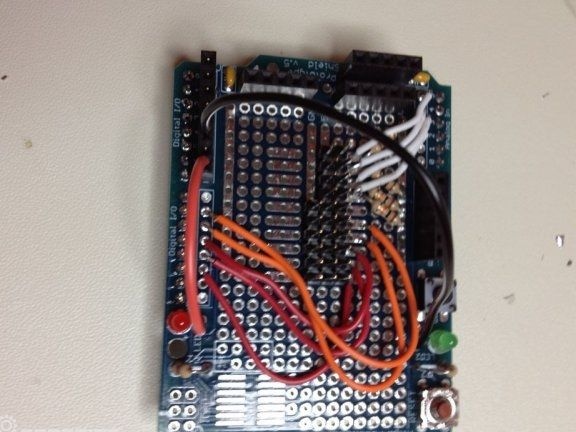
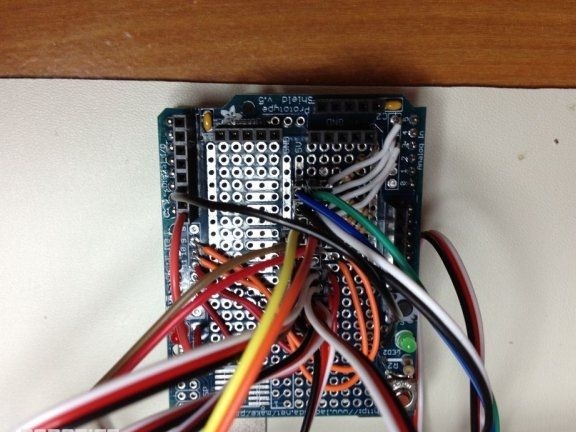
A vezetékeket a PWM kimenetekhez (szervo meghajtókhoz), valamint az analóg fotoelektromos ellenállásokhoz kell csatlakoztatnia. Minden fotorezisztorhoz adjon hozzá egy 10K-os ellenállást.
A Proto táblán van 7-es és 9-es érintkező, azokat csatlakoztatni kell a piros és a zöld LED pozitív csapjaihoz.
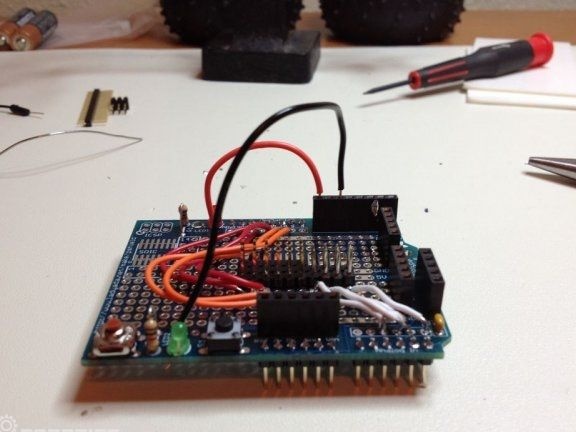
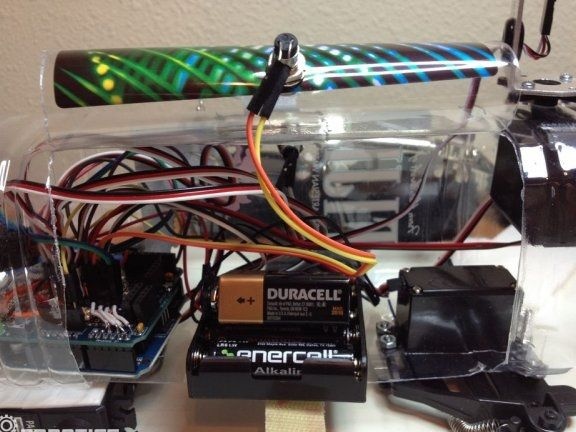
A négy szervóval és Arduino-val rendelkező robot normál működéséhez két tápegységre van szükség. A mikrovezérlő 9 V-os energiát igényel. Az ütközésérzékelőket és a szervókat négy AA elem fogja táplálni, ezek egy 6 V-os napelemhez vannak csatlakoztatva.
A napelem és az akkumulátor közötti fordított áram elkerülése érdekében diódát kell telepíteni az áramkörbe.
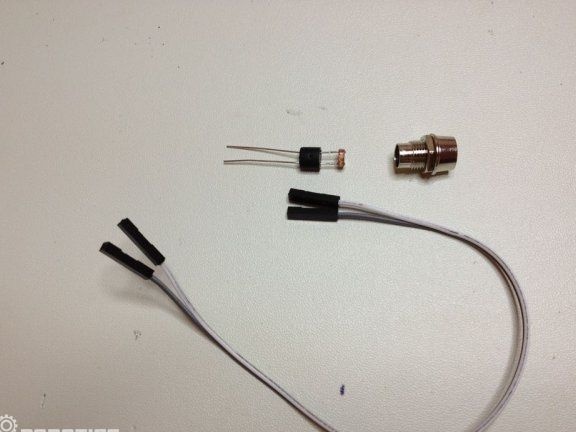
Második lépés Érzékelő előkészítése
A fotorezisztorokat tartókkal szerelik fel a peronra. Ez lehetővé teszi azok gyors eltávolítását a robot összeszerelése vagy finomítása során. A női / női jumper egyik vége a fotorezisztorhoz, a másik a Proto Shield táblahez van csatlakoztatva. Gumi tömítések megakadályozzák a rövidzárlatot.



Harmadik lépés Alváz szerelés
Az alváz gyártásához bébi autóra van szükség a kezelőpanelen. Szét kell szerelni, és csak azokat a elemeket kell hagyni, amelyek láthatóak a fotón. Az első tengelyt szervomotorral kell forgatni.
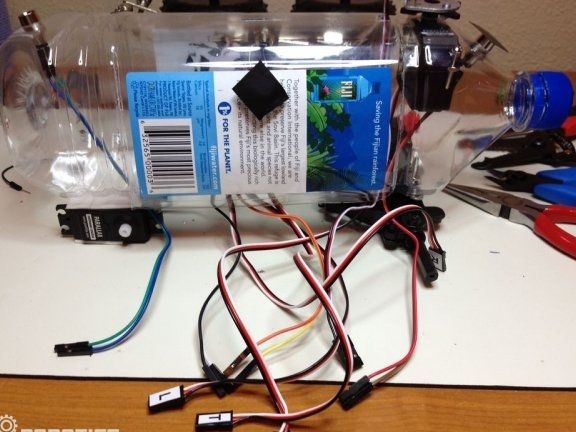
Mindkét elem (első és hátsó tengely) egy műanyag palackba van felszerelve, ehhez a mérethez szükséges lyukakat kivágják. Nos, most csak az marad, hogy mindent összekapcsoljon, mint a képen.





Negyedik lépés Programozási folyamat
A fő feladat, amelyet a robotkódnak elvégeznie kell, a fényforrás keresése és töltése belőle. Négy fotó ellenállást használnak a fényforrás keresésére. A programhuroknak összehasonlítania kell, hol világosabb a fény, majd a robotnak oda kell mennie.
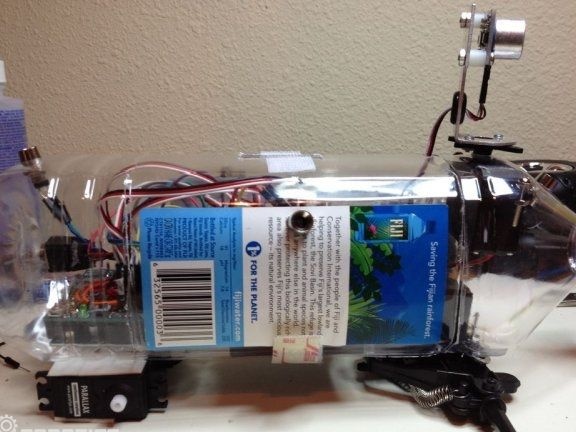
A robot összeomlásának megakadályozása érdekében egy másik ciklusnak 30 hüvelykben ellenőriznie kell az akadályokat. Ezen információk megszerzéséhez ultrahangos érzékelőt kell használni. Ha a robot akadályt észlel, akkor meg kell állnia, körül kell nézni, és kiválasztania a legjobb utat.
Ötödik lépés Az összeszerelés utolsó szakasza
A robot beprogramozása után végül összeszerelhető és tesztelhető. A robot teszteléséhez létre kell hoznia több eltérő fényerősségű fényforrást a helyiségben, és akadályokat kell létrehoznia a mozgásuk útjában. A robotnak akadályokba ütközés nélkül kell elérnie a legfényesebb fényforrást.





Természetesen még sok más lehetőség van a robot fejlesztésére. Sokféle funkciót adhat hozzá, itt minden a mester vágyától és képzeletétől függ.